AMCL深入解析 3/4 - 解决的核心问题 - 知乎
slam 学习之 AMCL 概念与原理分析_amcl定位原理-CSDN博客
AMCL 原理解读 - Gaowaly - 博客园
测距仪模型
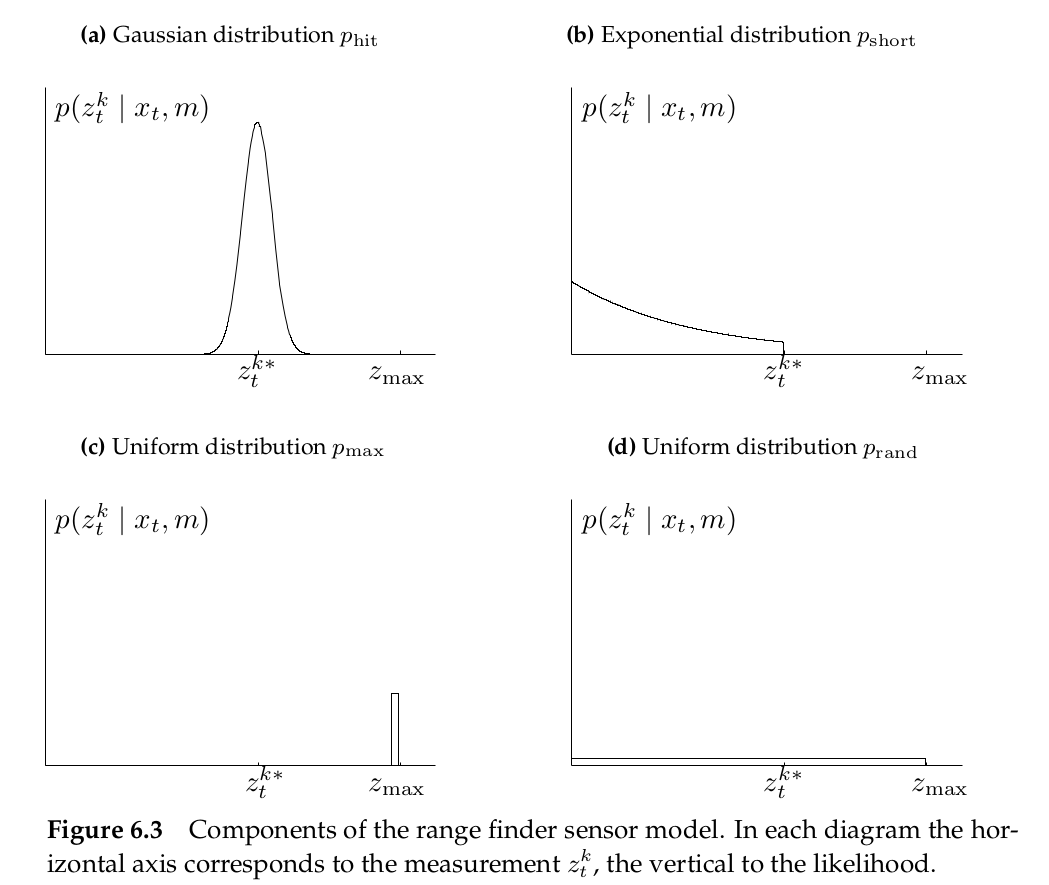
AMCL将激光雷达测量值分为四种情况:
- 带有噪声的正常测量值,高斯分布(我们要的障碍物)
- 动态物体测量值,指数分布(比如操作人走来走去的身体)
- 失败测量值,冲激分布(有时测不到,如物体太远、声呐传感器遇到镜面反射、激光雷达检测到黑色吸光物体,此时测得距离会认为是检测范围的最大值)
- 未知错误的测量值,均匀分布(测距仪偶尔会产生完全无法解释的测量,例如超声在几面墙之间反弹,从而产生随机意外噪声,采用均匀分布的假设简化)
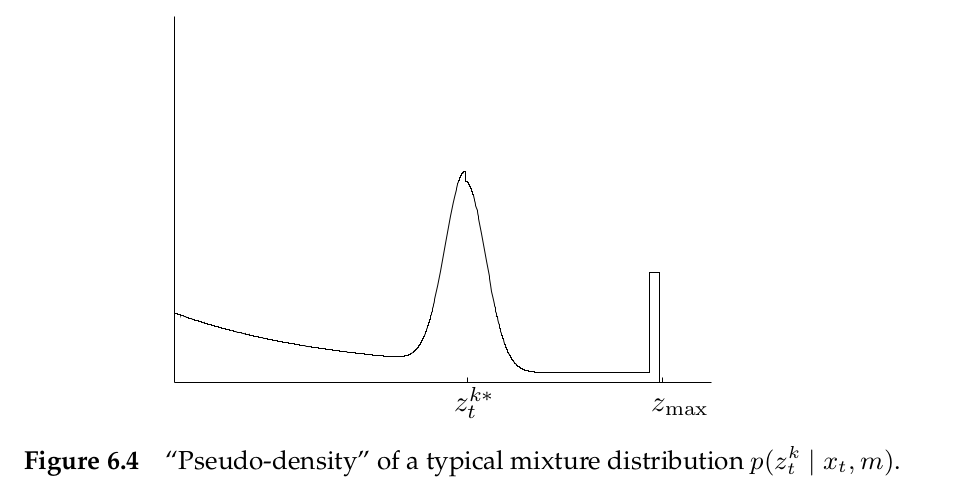
观测方程对应的测量模型是上述四种测量模型概率密度函数的混合。
设
四种测量值分布通过加权平均得到最终分布:
其中