关于关键点,序列信号的插值规划。关节运动规划、插值曲线生成。一维插值是横向变化均匀,二维插值是横纵运动都插值。贝塞尔曲线等方法比较智能
graph LR t((Target)) --> M[MotionCard] --> i((Interpolation))
如何对高维数据进行插值运算? - 知乎
数学建模学习笔记 | 插值算法_多维插值算法-CSDN博客
【轨迹生成】曲线插值法_插值曲线矢量-CSDN博客
机器人的规划算法(一)——关节空间路径/轨迹规划算法 - 知乎
(48 封私信 / 60 条消息) 技术分享 | 李群与轨迹规划 - 知乎
常见插值算法 | 计算机图形学笔记
数学建模笔记——插值拟合模型(一) - 简书
机器人的运动“规划”是给了路径点的,其实是拟合插值。
线性插值
略
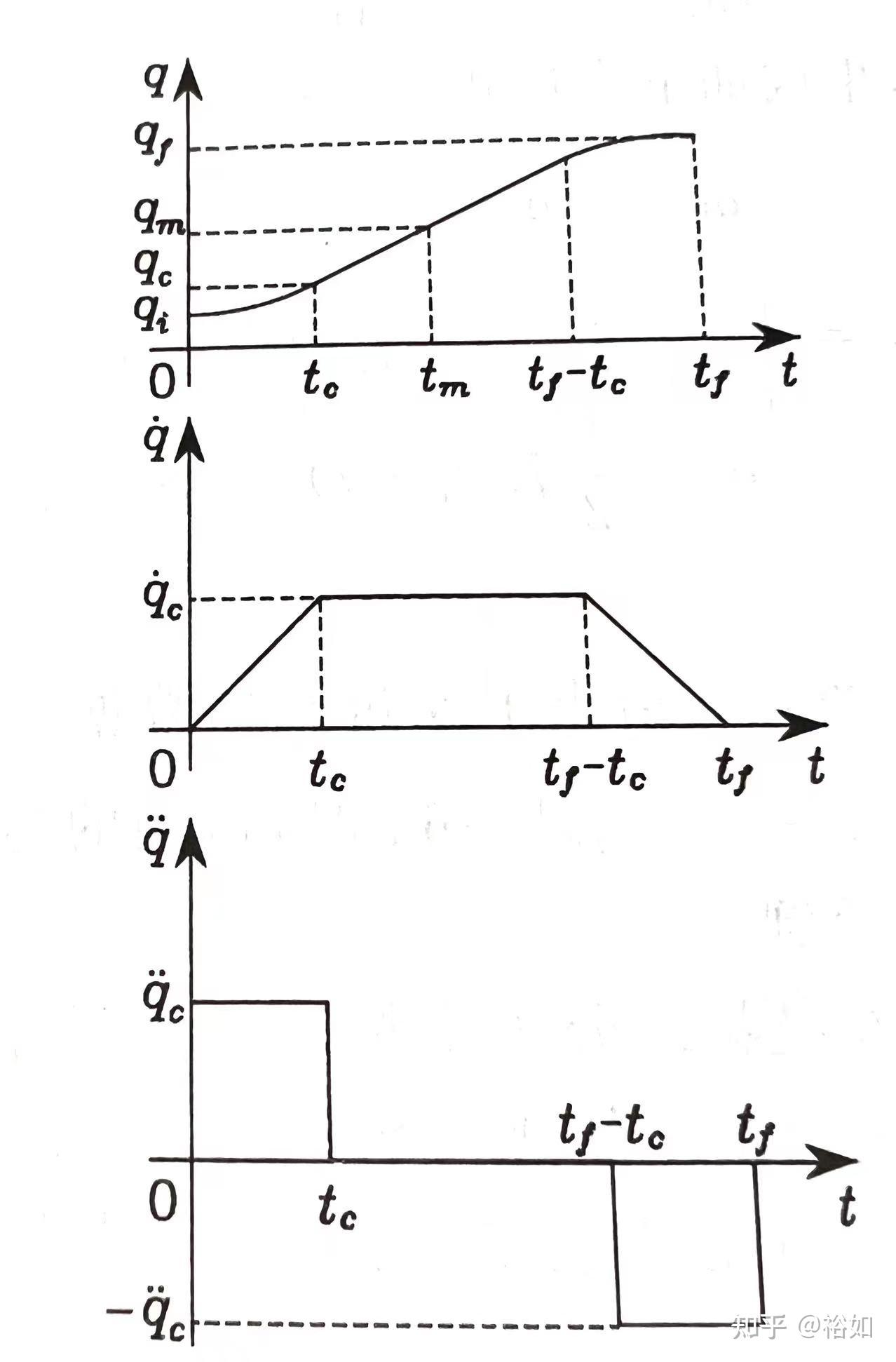
梯形速度插值
其实就是匀加速运动起步,一段时间后匀速运动,快到终点匀减速运动刹车
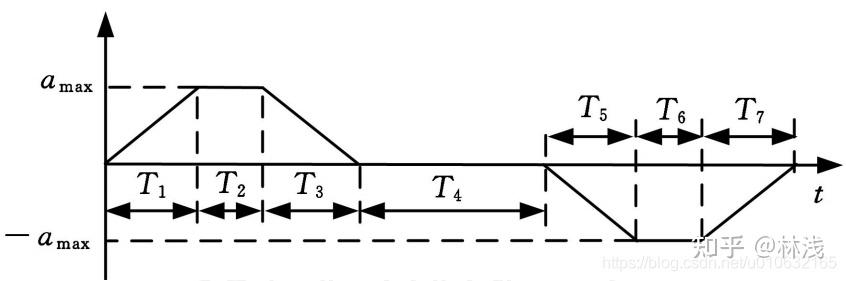
S形速度插值
运动控制——S型速度规划(一) - 知乎
一文教你快速搞懂速度曲线规划之S形曲线(超详细+图文+推导+附件代码)_s型速度曲线-CSDN博客

三角函数速度插值
数字信号处理 - -三角插值
ActionFZY给我的"腿规划",好像就是这种规划
实际上还是曲线的拼接。速度-时间曲线的S形曲线变成了三角函数曲线
%% 定义速度-时间曲线
% 加速阶段: V(t) = v - v * cos(pi * t / accel_time)
accel_idx = t <= accel_time;
V(accel_idx) = v - v * cos(pi * t(accel_idx) / accel_time);
% 减速阶段: V(t) = Vmax - v * (1 - cos(pi * (t - accel_time) / decel_time))
decel_idx = t > accel_time;
t_decel_phase = t(decel_idx) - accel_time; % 减速段相对时间
V(decel_idx) = Vmax - v * (1 - cos(pi * t_decel_phase / decel_time)); % 调整公式
多项式插值
B样条(B-Splines) | Zhe Li
【数值分析】插值法之多项式插值(1):拉格朗日法的算法介绍及代码实现(Python版) - 知乎
当时为了完成数学建模校赛,误打误撞推导出了拉格朗日插值法。
Akima插值
Makima插值
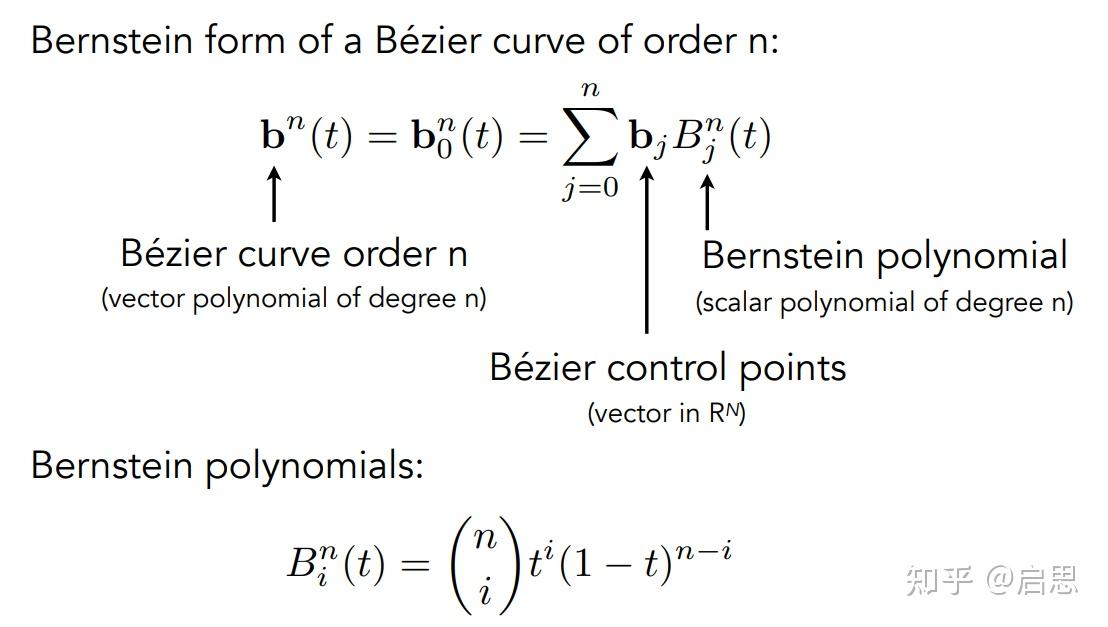
贝塞尔曲线
从零开始学图形学:10分钟看懂贝塞尔曲线 - 知乎
贝塞尔曲线与B样条 - 知乎
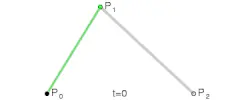
三阶(三个控制点)
四阶(四个控制点)

五阶(五个控制点)
对于三阶贝塞尔曲线,点在动线段上,可以用
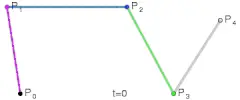
分段贝塞尔曲线
一旦确定了特征多边形的顶点数,就决定了曲线的阶数。如果曲线的阶数过高:
- 调整控制点对曲线的影响就比较小,调整起来相当麻烦。
- 数据点的数量太多,计算量急剧增加。
- 一条贝塞尔曲线无法做局部修改,牵一发而动全身。
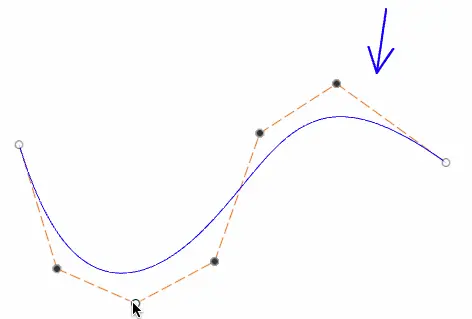
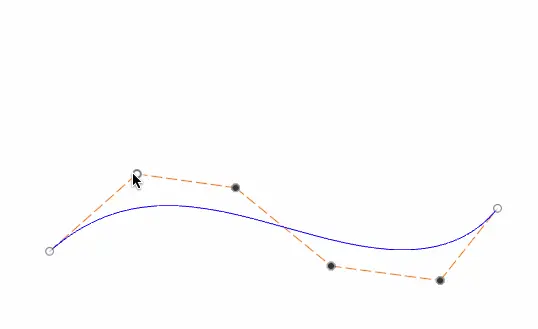
于是常用的,是分段贝塞尔曲线
对两侧的贝塞尔曲线求导,分别代入 t=0 和 t=1 (即贝塞尔曲线的开始和结束时间),让二者相等。此时能发现,当两侧控制点与分段交接点共线且形成的线段长度相等时,满足曲线平滑性质。

再分享一个网站,可以在线玩贝塞尔曲线:Bezier Curve Edit
B样条
贝塞尔曲线与B样条 - 知乎
B样条(B-Splines) | Zhe Li
Me: 当分段贝塞尔曲线的每一段都是三阶,每段的两侧控制点与分段交接点共线且形成的线段长度相等时,也就是满足两段贝塞尔曲线之间的平滑性质时,这是不是就是B样条?
Deepseek: 你的观察非常准确!在特定条件下,分段三阶贝塞尔曲线(即每段为三次贝塞尔曲线)确实可以等价于均匀三次B样条曲线